
2022.03.07
NanoSat 전열플라즈마 마이크로추진기의 백연특성 시험에서 저압의 정확한 제어방법
공유하다
자세한 세부 사항
NanoSat 전열플라즈마 마이크로추진기의 백연특성 시험에서 저압의 정확한 제어방법
개요: 이 기사는 다양한 나노위성 전열 플라즈마 마이크로추력기에 초점을 맞추고 있습니다. 0.1~10torr의 저압 범위에서 작동하는 포켓 로켓을 예로 들어 다양한 작동 가스의 특성과 연기의 다양한 저압을 분석합니다. 결과적인 효과는 저압의 정밀한 제어의 중요성을 보여줍니다. 프로펠러의 낮은 공기압을 정밀하게 제어하는 기술적 문제에 대해 본 논문에서는 구체적인 구현 방법을 소개하고 평가 테스트를 수행한다. 테스트 결과는 저공기압 제어의 변동 정도가 ±1% 이내로 도달할 수 있음을 보여줍니다. 결국, 본 논문에서는 테스트 방법을 최적화하고, 본격적인 저압 정밀 제어를 위한 보다 실용적인 기술 방안을 제안한다.
1. 질문
최근 나노위성(NanoSat)의 급속한 발전으로 인해 소형, 경량, 저비용, 고효율의 마이크로추진기가 절실히 요구되고 있다. 따라서 스러스터의 플라즈마 플룸 특성 등 물리적 특성에 대한 시험 및 평가가 필요하다. 플라즈마 기둥의 특성은 작업 가스와 환경 압력에 크게 영향을 받습니다. 외국산 포켓로켓 기둥의 성능시험을 예로 들어 저압의 정밀제어의 필요성과 중요성을 분석한다.
NanoSat 애플리케이션의 대표적인 대표주자인 Pocket Rocket은 μN에서 mN 정도의 추력을 달성할 수 있는 전열 무선 주파수 플라즈마 추진기입니다. 소형 로켓은 크기가 작고 용량성 무선 주파수 방전을 사용하기 때문에 저전력 조건에서도 고밀도 플라즈마 제트를 얻을 수 있습니다. 가볍고, 저렴하고, 추력이 낮고, 특정 충격량이 크며, 특히 마이크로어레이에 적합하고 장기간 전력을 제공하는 어레이 형태로도 작동할 수 있습니다.
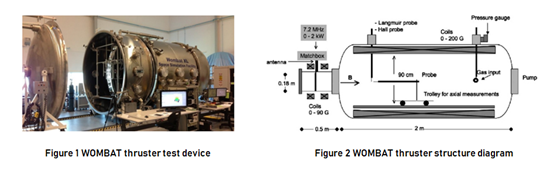
그림 1에 표시된 것처럼 수평 진공 챔버는 포켓 로켓 플라즈마 기둥의 특성을 테스트하기 위한 저압 환경을 제공합니다. 진공 챔버는 다양한 플라즈마 추진기의 성능 테스트 및 평가를 위해 다양한 테스트 장비를 통합할 수 있는 다기능 저압 환경 시뮬레이션 테스트 챔버입니다. 그림 2에서 볼 수 있듯이 저압 환경을 형성하기 위해 진공 챔버에는 분자 펌프, 기계식 펌프, 이온화 진공 게이지 및 정전 용량 압력 게이지가 장착되어 있습니다. 진공 챔버는 0.93mPa의 기준 진공에 도달할 수 있습니다. 테스트에 사용되는 가스 작동 유체는 일반적으로 질소와 아르곤입니다.
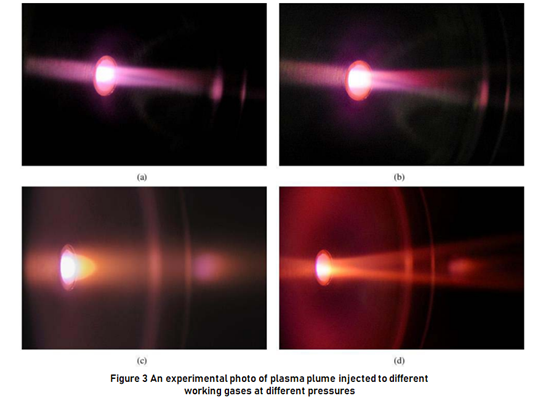
RF 전력과 주파수가 각각 20W와 13.56MHz인 조건에서 포켓 로켓의 깃털 특성은 다양한 저압에서 테스트되었습니다. 그림 3은 서로 다른 압력에서 서로 다른 작동 가스에 주입된 플라즈마 기둥의 실험 사진입니다. 그림 a는 약 1.5torr 저압 아르곤, 그림 b는 약 4.0torr 고압 아르곤, 그림 c는 약 1.0torr 저압 질소, 그림 d는 약 7.0torr 고압 질소입니다.
그림에서 볼 수 있듯이 질소와 아르곤 기둥은 모두 고압에서 특정 원뿔 각도로 퍼집니다. 빔은 낮은 압력에서 시준되지만 이러한 기능이 추력 생성에 미치는 영향은 명확하지 않으며 추가 연구가 필요합니다.
요약하자면, 다양한 작동 가스와 다양한 저압은 연기 특성에 상당한 영향을 미칩니다. 포켓로켓의 마이크로추진기는 0.1~10torr의 저압 범위에서 작동한다. 이 범위 내에서 연기 특성을 테스트하고 평가하려면 저압을 정밀하게 제어해야 합니다. 이 기사에서는 저압 제어를 위한 구체적인 구현 방법을 자세히 소개하고 구현 방법을 테스트 및 평가합니다. 마지막으로 구현 방법을 최적화하고 저압 전 범위의 정확한 제어 기술 방안을 제안합니다.
2. 저압의 정밀한 제어방법 및 시험평가
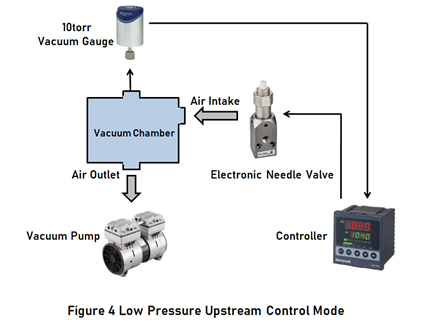
소위 저압이란 일반적으로 1표준기압보다 낮은 절대압력을 말하며 그 범위는 0.1~760torr이다. 커패시턴스 압력 게이지는 일반적으로 낮은 대기압을 정확하게 측정하는 데 사용됩니다. 일반적으로 전체 저압 범위의 측정을 포괄하기 위해 10torr 및 1000torr의 정전 용량 압력 게이지의 두 가지 범위를 채택했습니다. 시뮬레이션 테스트 장치의 진공 챔버는 일반적으로 흡입 및 배기를 통해 낮은 압력으로 제어되어야 합니다. 공기 흐름 방향에 따라 일반적으로 공기 흡입구 끝은 상류로 정의되고, 진공 펌프의 배기 끝은 하류로 정의됩니다. 제어 정확도에 따라 일반적으로 서로 다른 범위(10torr 및 1000torr)의 저압을 정확하게 제어하기 위해 상류 및 하류의 두 가지 제어 모드가 사용됩니다.
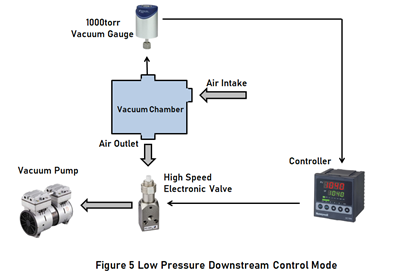
그림 4에서 볼 수 있듯이 업스트림 모드는 업스트림 압력과 출구 흐름을 유지하고 입구 흐름을 조정하여 챔버 압력을 제어하는 것입니다. 그림 5에서 볼 수 있듯이 하류 모드는 상류 압력과 입구 흐름을 유지하고 배기 흐름을 조정하여 챔버 압력을 제어하는 것입니다.
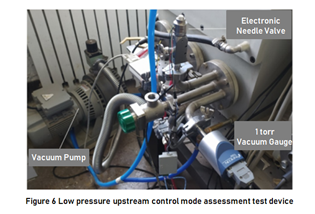
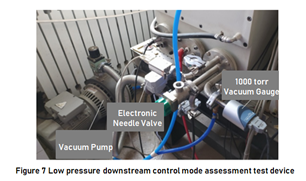
위의 두 가지 제어 모드에 대해 1torr와 1000torr의 용량성 압력 게이지 2개와 24비트 고정밀 압력 컨트롤러를 사용하여 평가 테스트를 수행했습니다. 테스트 장치는 그림 6과 그림 7에 나와 있습니다.
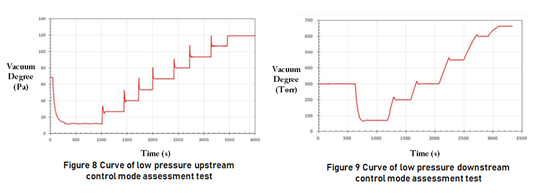
업스트림 모드 테스트 과정에서 진공 펌프를 먼저 켜고 최고 속도로 펌핑했으며 컨트롤러의 PID 매개변수를 약 68Pa로 자체 조정했습니다. 자체 튜닝이 완료된 후 12, 27, 40, 53, 67, 80, 93 및 107Pa의 8개 설정값이 각각 제어됩니다. 전체 제어과정 중 공기압의 변화는 그림 8과 같다.
다운스트림 모드 테스트 과정에서 진공 펌프를 먼저 켜고 최대 속도로 펌핑하고 공기 흡입 밸브를 마이크로 흡입 위치로 조정한 다음 컨트롤러의 PID 매개변수를 약 300torr로 자체 조정했습니다. Auto-Tuning이 완료되면 각각 70, 200, 300, 450, 600 Torr의 5개 설정값이 제어됩니다. 전체 제어 과정 중 공기압 변화는 그림 9에 나와 있습니다.
서로 다른 낮은 압력 상수 지점에서의 위의 제어 효과를 변동률로 표현하면 그림 10 및 그림 11에 표시된 전체 범위의 변동률 분포가 얻어집니다. 변동률 분포도를 보면 저압 전체 범위에서 ±1% 범위 내에서 변동률을 정확하게 제어할 수 있음을 알 수 있으며, 12Pa에서 큰 변동이 발생한 것은 68Pa에서 셀프 튜닝을 통해 얻은 PID 파라미터에 따른 것입니다. 이는 무리이며, 별도의 PID 파라미터 셀프튜닝이 필요합니다.
3. 본격적인 저압 정밀제어 구현
위의 공기압 정밀 제어 방법에서 볼 수 있듯이 실제 필요에 따라 다양한 제어 모드를 선택할 수 있습니다. 예를 들어, 10torr 이하의 저공기압 제어를 위해서는 상류 모드를 선택할 수 있고, 10~1000torr 범위의 고압 제어를 위해서는 하류 모드를 선택할 수 있다.
대부분의 저압 환경 시뮬레이션 테스트 장비, 특히 스러스터의 성능 테스트에서는 저압 전체 범위에서 공기압의 정밀한 제어 및 자동화가 필요하므로 이를 사용하거나 전환하는 것은 최선의 선택이 아닙니다. 업스트림 및 다운스트림 제어 모드만 가능합니다.
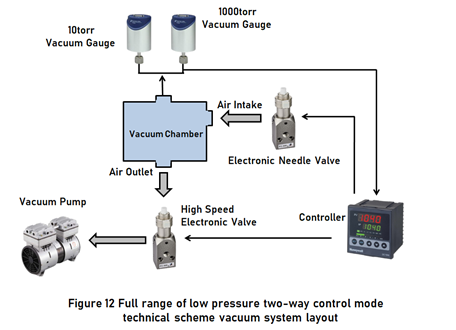
전체 저압 범위에서 자동 및 정밀 제어에 도달하기 위해 업스트림 및 다운스트림 모드를 통합하고 양방향 제어 모드에 대한 기술 방안을 제안했습니다. 전체 구성표 레이아웃은 그림 12에 나와 있습니다.
저압의 전체 제어 프로세스에서는 전체 범위를 포괄하려면 측정 범위가 서로 다른 두 개의 용량성 진공 게이지가 필요합니다. 연속 용량성 진공 게이지와 연속 이온화 진공 게이지를 사용하여 더 넓은 저압 범위를 포괄할 수도 있습니다. 전자 니들 밸브에 대한 자세한 내용을 보려면 다음 사이트를 방문하십시오.https://www.genndih.com/ko/proportional-flow-control-valve.htm
양방향 제어 모드의 기술 계획에서는 컨트롤러와 전자 니들 밸브에 대한 더 높은 요구 사항이 제시되며 이는 주로 다음 측면에 반영됩니다.
(1) 저압을 적시에 정확하게 측정하고 제어하려면 두 개의 진공 센서를 동시에 연결하고 저압 측정 값에 따라 두 개의 진공 센서 사이를 전환하는 기능이 필요합니다.
(2) 컨트롤러는 다양한 진공 게이지의 측정 정확도 요구 사항을 충족하고 진공 게이지의 측정 기능을 최대한 활용하려면 24비트 A/D 샘플링 정확도와 같은 높은 측정 정확도를 가져야 합니다.
(3) 양방향 제어 모드에서는 진공 압력 컨트롤러에도 정방향 및 역방향 제어 기능이 필요합니다. 즉, 업스트림 전자 니들 밸브에 대한 역방향 제어와 다운스트림 전자 볼 밸브에 대한 역방향 제어가 필요합니다.
(4) 양방향 제어 모드에서 전자 니들 밸브와 전자 볼 밸브는 업스트림 및 다운스트림 가스 흐름의 조정을 담당하며 교대로 작동해야 하므로 이러한 전자 니들 밸브는 가능한 가장 빠른 응답 속도를 가져야 합니다. 진공 챔버가 작을수록 공기압 관성이 작아지고 응답 속도가 빨라야 합니다. 일반적인 요구 사항은 밸브가 완전히 닫힌 상태에서 완전히 열리는 데 걸리는 시간이 2초 이내이거나 그보다 더 낮다는 것입니다.
요약하자면, 위의 양방향 모드의 저압 제어 방식을 채택함으로써, 특히 새로운 고성능 진공 압력 컨트롤러와 고속 전자 니들 밸브를 채택한 후 저압 전체 범위의 정밀한 제어에 도달할 수 있습니다.
개요: 이 기사는 다양한 나노위성 전열 플라즈마 마이크로추력기에 초점을 맞추고 있습니다. 0.1~10torr의 저압 범위에서 작동하는 포켓 로켓을 예로 들어 다양한 작동 가스의 특성과 연기의 다양한 저압을 분석합니다. 결과적인 효과는 저압의 정밀한 제어의 중요성을 보여줍니다. 프로펠러의 낮은 공기압을 정밀하게 제어하는 기술적 문제에 대해 본 논문에서는 구체적인 구현 방법을 소개하고 평가 테스트를 수행한다. 테스트 결과는 저공기압 제어의 변동 정도가 ±1% 이내로 도달할 수 있음을 보여줍니다. 결국, 본 논문에서는 테스트 방법을 최적화하고, 본격적인 저압 정밀 제어를 위한 보다 실용적인 기술 방안을 제안한다.
1. 질문
최근 나노위성(NanoSat)의 급속한 발전으로 인해 소형, 경량, 저비용, 고효율의 마이크로추진기가 절실히 요구되고 있다. 따라서 스러스터의 플라즈마 플룸 특성 등 물리적 특성에 대한 시험 및 평가가 필요하다. 플라즈마 기둥의 특성은 작업 가스와 환경 압력에 크게 영향을 받습니다. 외국산 포켓로켓 기둥의 성능시험을 예로 들어 저압의 정밀제어의 필요성과 중요성을 분석한다.
NanoSat 애플리케이션의 대표적인 대표주자인 Pocket Rocket은 μN에서 mN 정도의 추력을 달성할 수 있는 전열 무선 주파수 플라즈마 추진기입니다. 소형 로켓은 크기가 작고 용량성 무선 주파수 방전을 사용하기 때문에 저전력 조건에서도 고밀도 플라즈마 제트를 얻을 수 있습니다. 가볍고, 저렴하고, 추력이 낮고, 특정 충격량이 크며, 특히 마이크로어레이에 적합하고 장기간 전력을 제공하는 어레이 형태로도 작동할 수 있습니다.
그림 1에 표시된 것처럼 수평 진공 챔버는 포켓 로켓 플라즈마 기둥의 특성을 테스트하기 위한 저압 환경을 제공합니다. 진공 챔버는 다양한 플라즈마 추진기의 성능 테스트 및 평가를 위해 다양한 테스트 장비를 통합할 수 있는 다기능 저압 환경 시뮬레이션 테스트 챔버입니다. 그림 2에서 볼 수 있듯이 저압 환경을 형성하기 위해 진공 챔버에는 분자 펌프, 기계식 펌프, 이온화 진공 게이지 및 정전 용량 압력 게이지가 장착되어 있습니다. 진공 챔버는 0.93mPa의 기준 진공에 도달할 수 있습니다. 테스트에 사용되는 가스 작동 유체는 일반적으로 질소와 아르곤입니다.
RF 전력과 주파수가 각각 20W와 13.56MHz인 조건에서 포켓 로켓의 깃털 특성은 다양한 저압에서 테스트되었습니다. 그림 3은 서로 다른 압력에서 서로 다른 작동 가스에 주입된 플라즈마 기둥의 실험 사진입니다. 그림 a는 약 1.5torr 저압 아르곤, 그림 b는 약 4.0torr 고압 아르곤, 그림 c는 약 1.0torr 저압 질소, 그림 d는 약 7.0torr 고압 질소입니다.
그림에서 볼 수 있듯이 질소와 아르곤 기둥은 모두 고압에서 특정 원뿔 각도로 퍼집니다. 빔은 낮은 압력에서 시준되지만 이러한 기능이 추력 생성에 미치는 영향은 명확하지 않으며 추가 연구가 필요합니다.
요약하자면, 다양한 작동 가스와 다양한 저압은 연기 특성에 상당한 영향을 미칩니다. 포켓로켓의 마이크로추진기는 0.1~10torr의 저압 범위에서 작동한다. 이 범위 내에서 연기 특성을 테스트하고 평가하려면 저압을 정밀하게 제어해야 합니다. 이 기사에서는 저압 제어를 위한 구체적인 구현 방법을 자세히 소개하고 구현 방법을 테스트 및 평가합니다. 마지막으로 구현 방법을 최적화하고 저압 전 범위의 정확한 제어 기술 방안을 제안합니다.
2. 저압의 정밀한 제어방법 및 시험평가
소위 저압이란 일반적으로 1표준기압보다 낮은 절대압력을 말하며 그 범위는 0.1~760torr이다. 커패시턴스 압력 게이지는 일반적으로 낮은 대기압을 정확하게 측정하는 데 사용됩니다. 일반적으로 전체 저압 범위의 측정을 포괄하기 위해 10torr 및 1000torr의 정전 용량 압력 게이지의 두 가지 범위를 채택했습니다. 시뮬레이션 테스트 장치의 진공 챔버는 일반적으로 흡입 및 배기를 통해 낮은 압력으로 제어되어야 합니다. 공기 흐름 방향에 따라 일반적으로 공기 흡입구 끝은 상류로 정의되고, 진공 펌프의 배기 끝은 하류로 정의됩니다. 제어 정확도에 따라 일반적으로 서로 다른 범위(10torr 및 1000torr)의 저압을 정확하게 제어하기 위해 상류 및 하류의 두 가지 제어 모드가 사용됩니다.
그림 4에서 볼 수 있듯이 업스트림 모드는 업스트림 압력과 출구 흐름을 유지하고 입구 흐름을 조정하여 챔버 압력을 제어하는 것입니다. 그림 5에서 볼 수 있듯이 하류 모드는 상류 압력과 입구 흐름을 유지하고 배기 흐름을 조정하여 챔버 압력을 제어하는 것입니다.
위의 두 가지 제어 모드에 대해 1torr와 1000torr의 용량성 압력 게이지 2개와 24비트 고정밀 압력 컨트롤러를 사용하여 평가 테스트를 수행했습니다. 테스트 장치는 그림 6과 그림 7에 나와 있습니다.
업스트림 모드 테스트 과정에서 진공 펌프를 먼저 켜고 최고 속도로 펌핑했으며 컨트롤러의 PID 매개변수를 약 68Pa로 자체 조정했습니다. 자체 튜닝이 완료된 후 12, 27, 40, 53, 67, 80, 93 및 107Pa의 8개 설정값이 각각 제어됩니다. 전체 제어과정 중 공기압의 변화는 그림 8과 같다.
다운스트림 모드 테스트 과정에서 진공 펌프를 먼저 켜고 최대 속도로 펌핑하고 공기 흡입 밸브를 마이크로 흡입 위치로 조정한 다음 컨트롤러의 PID 매개변수를 약 300torr로 자체 조정했습니다. Auto-Tuning이 완료되면 각각 70, 200, 300, 450, 600 Torr의 5개 설정값이 제어됩니다. 전체 제어 과정 중 공기압 변화는 그림 9에 나와 있습니다.
서로 다른 낮은 압력 상수 지점에서의 위의 제어 효과를 변동률로 표현하면 그림 10 및 그림 11에 표시된 전체 범위의 변동률 분포가 얻어집니다. 변동률 분포도를 보면 저압 전체 범위에서 ±1% 범위 내에서 변동률을 정확하게 제어할 수 있음을 알 수 있으며, 12Pa에서 큰 변동이 발생한 것은 68Pa에서 셀프 튜닝을 통해 얻은 PID 파라미터에 따른 것입니다. 이는 무리이며, 별도의 PID 파라미터 셀프튜닝이 필요합니다.
3. 본격적인 저압 정밀제어 구현
위의 공기압 정밀 제어 방법에서 볼 수 있듯이 실제 필요에 따라 다양한 제어 모드를 선택할 수 있습니다. 예를 들어, 10torr 이하의 저공기압 제어를 위해서는 상류 모드를 선택할 수 있고, 10~1000torr 범위의 고압 제어를 위해서는 하류 모드를 선택할 수 있다.
대부분의 저압 환경 시뮬레이션 테스트 장비, 특히 스러스터의 성능 테스트에서는 저압 전체 범위에서 공기압의 정밀한 제어 및 자동화가 필요하므로 이를 사용하거나 전환하는 것은 최선의 선택이 아닙니다. 업스트림 및 다운스트림 제어 모드만 가능합니다.
전체 저압 범위에서 자동 및 정밀 제어에 도달하기 위해 업스트림 및 다운스트림 모드를 통합하고 양방향 제어 모드에 대한 기술 방안을 제안했습니다. 전체 구성표 레이아웃은 그림 12에 나와 있습니다.
저압의 전체 제어 프로세스에서는 전체 범위를 포괄하려면 측정 범위가 서로 다른 두 개의 용량성 진공 게이지가 필요합니다. 연속 용량성 진공 게이지와 연속 이온화 진공 게이지를 사용하여 더 넓은 저압 범위를 포괄할 수도 있습니다. 전자 니들 밸브에 대한 자세한 내용을 보려면 다음 사이트를 방문하십시오.https://www.genndih.com/ko/proportional-flow-control-valve.htm
양방향 제어 모드의 기술 계획에서는 컨트롤러와 전자 니들 밸브에 대한 더 높은 요구 사항이 제시되며 이는 주로 다음 측면에 반영됩니다.
(1) 저압을 적시에 정확하게 측정하고 제어하려면 두 개의 진공 센서를 동시에 연결하고 저압 측정 값에 따라 두 개의 진공 센서 사이를 전환하는 기능이 필요합니다.
(2) 컨트롤러는 다양한 진공 게이지의 측정 정확도 요구 사항을 충족하고 진공 게이지의 측정 기능을 최대한 활용하려면 24비트 A/D 샘플링 정확도와 같은 높은 측정 정확도를 가져야 합니다.
(3) 양방향 제어 모드에서는 진공 압력 컨트롤러에도 정방향 및 역방향 제어 기능이 필요합니다. 즉, 업스트림 전자 니들 밸브에 대한 역방향 제어와 다운스트림 전자 볼 밸브에 대한 역방향 제어가 필요합니다.
(4) 양방향 제어 모드에서 전자 니들 밸브와 전자 볼 밸브는 업스트림 및 다운스트림 가스 흐름의 조정을 담당하며 교대로 작동해야 하므로 이러한 전자 니들 밸브는 가능한 가장 빠른 응답 속도를 가져야 합니다. 진공 챔버가 작을수록 공기압 관성이 작아지고 응답 속도가 빨라야 합니다. 일반적인 요구 사항은 밸브가 완전히 닫힌 상태에서 완전히 열리는 데 걸리는 시간이 2초 이내이거나 그보다 더 낮다는 것입니다.
요약하자면, 위의 양방향 모드의 저압 제어 방식을 채택함으로써, 특히 새로운 고성능 진공 압력 컨트롤러와 고속 전자 니들 밸브를 채택한 후 저압 전체 범위의 정밀한 제어에 도달할 수 있습니다.