
Un tutorial detallado sobre el grado de vacío y el método de control de la temperatura en la caja de guantes
Resumen: Con el fin de alcanzar potentes funciones de la caja de guantes para dos variables ambientales de vacío y temperatura en la caja de guantes. Este artículo se centra en la solución integrada para la medición y el control precisos del vacío y la temperatura, y describe los métodos ascendente, descendente y bidireccional. También presenta la aplicación específica del modo de control de conmutación en diferentes rangos de grado de vacío, y demuestra la nueva válvula de control de flujo proporcional y el controlador PID de ultra alta precisión de 24 bits utilizado en el control.
1. Preguntas
Las cajas de guantes al vacío se utilizan a menudo para sustancias fácilmente oxidables y delicuescentes. Las reacciones químicas, el procesamiento de materiales y las pruebas de rendimiento que requieren operaciones manuales en un entorno anaeróbico y anhidro son muy útiles. La función principal de la caja de guantes es proporcionar un entorno de vacío y fácil de usar, pero en las aplicaciones prácticas actuales la mayoría de las cajas de guantes sólo utilizan el entorno anaeróbico y las funciones de operación manual de la caja de guantes, y no dan plena capacidad al papel de la caja de guantes. La aplicación más potente de la caja de guantes también se refleja en los dos aspectos siguientes:
(1) La caja de guantes de vacío es una caja ambiental hermética, y el grado de vacío final puede alcanzar generalmente alrededor de 10Pa, de modo que el grado de vacío en la caja de guantes puede ser controlado en cualquier punto de ajuste entre 10Pa y la presión atmosférica según sea necesario. Se pueden llevar a cabo varias reacciones químicas, experimentos y pruebas que son sensibles al vacío; también se pueden realizar varias operaciones manuales sin cambiar ni destruir el entorno de vacío.
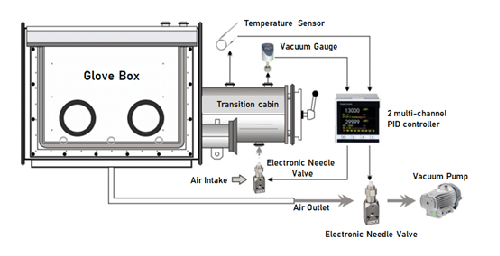
(2) Además del vacío, la temperatura es otra variable ambiental importante para muchas reacciones, experimentos y pruebas. Colocando el correspondiente dispositivo de calentamiento en la caja de guantes, se pueden llevar a cabo diversos estudios experimentales bajo el entorno combinado de temperatura y grado de vacío. Y así sucesivamente, también pueden configurarse otras condiciones ambientales de cantidades físicas para formar condiciones de prueba de acoplamiento de cantidades físicas múltiples bajo diversas condiciones límite. Con el fin de lograr el pleno rendimiento de una caja de guantes de vacío, se centra en dos variables ambientales de grado de vacío y la temperatura en la caja de guantes. Este artículo presenta en detalle la solución integrada para la medición y el control precisos del grado de vacío y la temperatura, y presenta los diferentes rangos de grado de vacío de los modos de control ascendente, descendente y bidireccional en el proceso de control del vacío.
2. Control de vacío en caja de guantes
La caja de guantes pertenece a una cavidad de bajo vacío. El grado de vacío de la guantera utilizando una bomba mecánica puede alcanzar generalmente una presión absoluta de unos 10Pa. Mediante el vacío y el llenado con gas inerte, el grado de vacío de la caja de guantes puede controlarse desde 10Pa hasta una atmósfera (presión absoluta de 0,1MPa). Para el control en tal rango de vacío que abarca cuatro órdenes de magnitud, se utilizarán sensores de vacío con diferentes precisiones según las necesidades reales, y habrá diferentes modos de control en consecuencia. A continuación se presenta el contenido específico de cada modo de control.
2.1 Modo de control ascendente
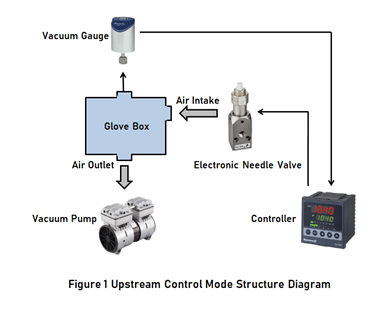
Como se muestra en la Figura 1, bajo la condición de que las velocidades de bombeo de la bomba de vacío aguas abajo se mantienen constantes. El modo de control aguas arriba consiste en ajustar la apertura de la válvula de control de flujo proporcional del puerto de entrada de aire aguas arriba a través del controlador de presión de vacío PID de acuerdo con la señal de medición del vacuómetro, es decir, controlando el flujo de entrada para mantener la presión en la guantera en el punto de ajuste. El modo aguas arriba se utiliza a menudo para el control de alto vacío.
2.2 Modo de control descendente
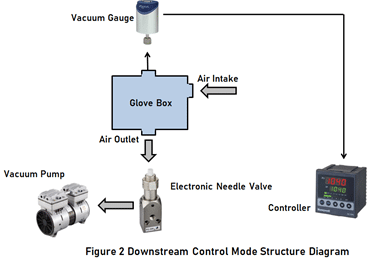
Como se muestra en la Figura 2, bajo la condición de que la velocidad de bombeo de la bomba de vacío aguas abajo se mantiene constante, el modo de control aguas abajo consiste en ajustar la apertura de la válvula de control de flujo proporcional de la salida de aire aguas abajo a través del controlador de presión de vacío PID de acuerdo con la señal de medición del vacuómetro, es decir, mediante el control del caudal de aire, la presión en el tanque de guantes se controla en el valor establecido. Podemos ver que el modo aguas abajo se utiliza a menudo para el control de bajo vacío.
2.3 Bidireccional Modo de control
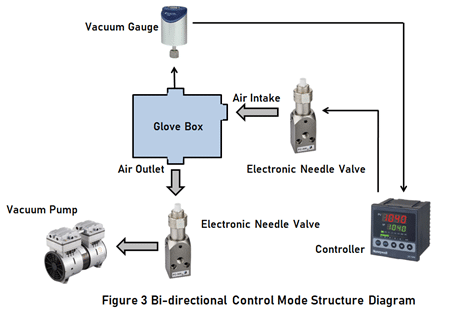
Los modos de control anteriores, ascendente y descendente, tienen sus propias ventajas y rara vez se utilizan solos en las aplicaciones prácticas. Por lo general, los modos aguas arriba y aguas abajo se integran juntos, lo que constituye el llamado modo de control bidireccional, como se muestra en la figura 3. En el modo de control bidireccional, se requiere que el controlador de presión de vacío tenga funciones de control hacia adelante y hacia atrás, es decir, control inverso para la válvula de control de flujo proporcional aguas arriba y control inverso para la válvula de control de flujo proporcional aguas abajo.
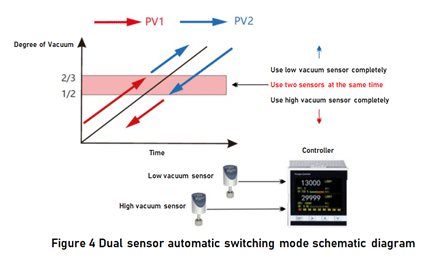
2.4 Modo de conmutación automática de doble sensor
Como se ha mencionado anteriormente, si la medición y el control precisos del grado de vacío se llevan a cabo en el rango completo de 10Pa~0,1MPa, generalmente es necesario configurar dos manómetros de diafragma de alta precisión de 1000Torr y 10Torrswitch automáticamente. Como se muestra en la Figura 4, el punto de conmutación alto (2-3) es el punto alto donde funciona el sensor de bajo vacío, y el punto de conmutación bajo (1-2) es el punto bajo donde funciona el sensor de alto vacío. El controlador realiza el cálculo de suavización entre estos dos puntos. Cuando el muestreo continuo de la medición de bajo vacío PV1 y de la medición de alto vacío PV2 está por debajo del punto de conmutación inferior, se cambia al sensor de vacío grueso. Cuando el muestreo continuo del valor medido de bajo vacío PV1 y el valor medido de alto vacío PV2 está por encima del punto de conmutación superior, se realiza la conmutación al sensor de alto vacío.
3. Selección del vacuómetro, la válvula y el controlador
3.1 Selección del sensor de vacío
Al igual que otros sensores, los distintos sensores de vacío también tienen un rango de medición y una precisión determinados. La regla básica es que un sensor con un rango de medición amplio tiene poca precisión; un sensor con alta precisión de medición tiene un rango de medición más estrecho. En el caso de la caja de guantes, como se muestra en la figura 5, los sensores de vacío utilizados suelen tener las tres categorías siguientes:
(1) Vacuómetro convencional: Medidor de vacío Pirani, la precisión es de ±(15~50)% de la escala completa, pero un medidor de vacío puede cubrir la escala completa.
(2) Vacuómetro de alta precisión: manómetro de diafragma, la precisión es de ±2,5% del fondo de escala, si cubre el rango de 10Pa~0,1MPa, generalmente se requieren dos vacuómetros de 1000Torr y 10Torr.
(3) Medidor de vacío de ultra alta precisión: medidor de vacío de semiconductores, la precisión es de ±0,05% de la escala completa, y el rango efectivo es de 50Pa ~ 0,1MPa, que no puede cubrir un vacío más alto.
3.2 Selección de la válvula eléctrica
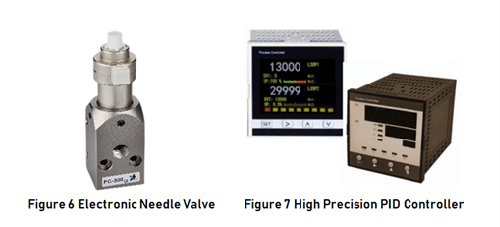
En la guantera de control de vacío, generalmente intervienen dos tipos de válvulas: una es una válvula de admisión de aire que ajusta el flujo en la admisión de aire, y la otra es una válvula de escape que ajusta el flujo de escape. Las válvulas de admisión de aire se utilizan sobre todo para la regulación de pequeños caudales, por lo que generalmente se seleccionan válvulas de aguja. Las válvulas de escape se utilizan sobre todo para la aspiración, por lo que generalmente se requieren válvulas de bola de mayor diámetro. Debido al control automático, tanto las válvulas de aguja como las de bola deben ser accionadas por tensión continua, corriente continua o señal digital (RS485), lo que constituye la llamada válvula de control de flujo proporcional. La válvula de control de flujo proporcional selecciona una válvula de control de flujo proporcional accionada por un motor de pasos de pequeño tamaño, como se muestra en la Figura 6. Esta válvula de control de flujo proporcional tiene una alta velocidad de respuesta (dentro de 1s) y linealidad (dentro de 1%). Para la válvula de control de flujo proporcional de la serie FC, visite https://www.genndih.com/proportional-flow-control-valve.htm
3.2 Selección del controlador
A partir de los diversos modos de control del grado de vacío de la caja de guantes, se puede ver que el proceso de control del grado de vacío plantea altos requisitos para el controlador. Como se muestra en la figura 7, el controlador seleccionado debe cumplir los siguientes criterios:
(1) Al menos es un controlador PID, y tiene la función de autoajuste de los parámetros PID.
(2) La precisión del propio vacuómetro es alta. Para dar todo el juego a la precisión de medición del vacuómetro, el controlador PID que necesita la adquisición de datos y el control debe tener una alta precisión. Se recomienda que el controlador tenga una adquisición A/D de 24 bits y una salida D/A de 16 bits. (3) Se requieren al menos 2 canales para lograr la medición y el control simultáneos de la temperatura y el grado de vacío, también para reducir el espacio de instalación.
(4) Funciones de acceso a múltiples señales de entrada, que pueden conectar directamente las señales de entrada de diferentes tipos de sensores, como el termopar, la resistencia térmica, la tensión continua, etc., para lograr la comprobación, visualización y control simultáneos de diferentes parámetros.
(5) Función de control de avance y retroceso para alcanzar el modo de control bidireccional.
(6) Con la función de conmutación de sensor dual, cada canal puede soportar la conmutación de sensor dual de alta y baja temperatura y de alto y bajo vacío. Dos canales pueden formar una combinación de control con un total de cuatro sensores conectados.
(7) Función de control de programa, puede crear y guardar múltiples programas de control por sí mismo, y sólo necesita seleccionar y llamar para iniciar (modo de control de programa).
(8) Dispone de una interfaz de comunicación para conectar con el ordenador, como la interfaz RS485 del protocolo estándar MODBUS.
4. Control de la temperatura de la guantera
Además de proporcionar un entorno de vacío, la guantera también puede poner un dispositivo de calefacción en la guantera para realizar varios experimentos y pruebas a diferentes temperaturas, por lo que es necesario introducir la función de control de temperatura en la aplicación de la guantera. El control de temperatura es una tecnología muy madura y clásica, que generalmente se realiza utilizando un controlador PID en combinación con un sensor de temperatura. Con el fin de reducir el coste y el volumen de instalación, generalmente se utiliza un controlador PID multicanal para controlar la temperatura y el grado de vacío al mismo tiempo. El controlador se comunica con un ordenador para mostrar y almacenar los datos de control y las curvas de medición. Por lo general, la temperatura de trabajo en la caja de guantes no tiene que ser demasiado alta, pero si la protección térmica y la refrigeración se hacen bien, también se puede lograr el rango de temperatura de trabajo por encima de 1000°C. El sensor de medición de la temperatura suele elegir un termopar. Si la precisión de la medición es alta, también se puede elegir la resistencia térmica y el sensor de temperatura de termistor. Estos sensores pueden conectarse directamente al mencionado controlador PID de alta precisión.
5. Conclusión
A través de la introducción del contenido anterior, se explican básicamente los diversos métodos de control del grado de vacío y la temperatura en la caja de guantes y los principales sensores, la válvula de control de flujo proporcional y los controladores PID involucrados. En aplicaciones específicas, se pueden realizar mejoras parciales en la estructura y función específicas de la caja de guantes, y el diseño general, la instalación y la integración de la caja de guantes también se pueden llevar a cabo de acuerdo con los requisitos reales.
Aunque este artículo sólo introduce la medición y el control del grado de vacío y la temperatura en la caja de guantes, estos métodos y contenidos específicos de implementación también pueden extenderse y aplicarse al control de los parámetros de prueba en otros campos que son más sensibles al entorno de la atmósfera, como la baja temperatura, la cantidad geométrica, la óptica y la acústica.