
2022.03.07
Метод точного управления низким давлением в тесте характеристик факела электротермического плазменного микродвигателя NanoSat
доля
БОЛЕЕ ДЕТАЛЬНО
Метод точного управления низким давлением в тесте характеристик факела электротермического плазменного микродвигателя NanoSat
Аннотация: В данной статье рассматриваются различные электротермические плазменные микродвигатели наноспутников. На примере карманной ракеты, работающей в диапазоне низких давлений от 0,1 до 10 Торр, анализируются характеристики различных рабочих газов и различных малых давлений на шлейфе. Полученные эффекты иллюстрируют важность точного контроля низкого давления. Что касается технической проблемы точного контроля низкого давления воздуха в пропеллере, в этой статье подробно описывается конкретный метод реализации и проводятся оценочные испытания. Результаты испытаний показывают, что степень колебания контроля низкого давления воздуха может достигать ± 1%. В конце концов, в этой статье оптимизируется метод испытаний и предлагается более практичная техническая схема для полномасштабного точного контроля низкого давления.
1. Вопрос
В последние годы, в связи с быстрым развитием NanoSat, возникла острая потребность в небольших по объему, легких, недорогих и высокоэффективных микродвигателях. Поэтому необходимо провести испытания и оценку физических свойств, таких как характеристики плазменного факела двигателя. На характеристики плазменного факела существенное влияние оказывают давление рабочего газа и окружающей среды. На примере испытаний на работоспособность факела зарубежной карманной ракеты анализируется необходимость и важность точного контроля низкого давления.
Типичный представитель приложений NanoSat Pocket Rocket представляет собой электротермический радиочастотный плазменный двигатель, который может развивать тягу порядка от мкН до мН. Благодаря своим компактным размерам и использованию емкостного радиочастотного разряда карманные ракеты могут получать плазменные струи высокой плотности в условиях малой мощности. Он легкий, недорогой, с малой тягой и большим удельным импульсом, а также может работать в виде массивов, которые особенно подходят для микрочипов и обеспечивают питание в течение длительного времени.
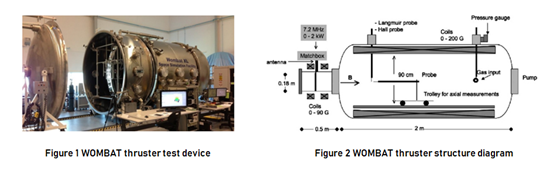
Как показано на рисунке 1, горизонтальная вакуумная камера обеспечивает среду низкого давления для проверки характеристик плазменного факела карманной ракеты. Вакуумная камера представляет собой многофункциональную испытательную камеру для моделирования среды низкого давления, в которой можно интегрировать различное испытательное оборудование для проверки производительности и оценки различных плазменных двигателей. Как показано на рисунке 2, для создания среды низкого давления вакуумная камера оснащена молекулярным насосом, механическим насосом, ионизационным вакуумметром и емкостным манометром. Вакуумная камера может достигать эталонного вакуума 0,93 мПа. Рабочими газами в тесте обычно являются азот и аргон.
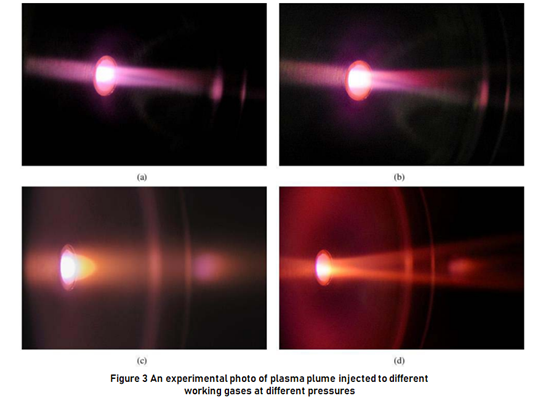
При мощности и частоте радиочастот 20 Вт и 13,56 МГц соответственно характеристики шлейфа карманной ракеты были протестированы при различных низких давлениях. На рис. 3 представлена экспериментальная фотография плазменного факела, инжектируемого в разные рабочие газы при разных давлениях. Рисунок a представляет собой аргон низкого давления примерно 1,5 торр, рисунок b представляет собой аргон высокого давления примерно 4,0 торр, рисунок c представляет собой азот низкого давления примерно 1,0 торр и рисунок d представляет собой азот высокого давления примерно 7,0 торр.
Из рисунка видно, что факелы как азота, так и аргона при высоком давлении распространяются под определенным углом конуса. Балки коллимируются при низком давлении, но влияние этих особенностей на создание тяги неясно и требует дальнейшего изучения.
Подводя итог, можно сказать, что разные рабочие газы и разное низкое давление будут оказывать существенное влияние на характеристики шлейфа. Микродвигатель карманной ракеты работает в диапазоне низких давлений от 0,1 до 10 Торр. Тестирование и оценка характеристик шлейфа в этом диапазоне требует точного контроля низкого давления. В этой статье будет подробно описан конкретный метод реализации контроля низкого давления, а также протестирован и оценен метод реализации. Наконец, метод реализации будет оптимизирован и предложена техническая схема точного управления полным диапазоном низкого давления.
2. Точный метод контроля и тестовая оценка низкого давления.
Так называемое низкое давление обычно относится к абсолютному давлению ниже 1 стандартного атмосферного давления и диапазону 0,1 ~ 760 Торр. Емкостный манометр обычно используется для точного измерения низкого атмосферного давления. Обычно используются два разных диапазона емкостного манометра 10 Торр и 1000 Торр, чтобы охватить измерение всего диапазона низкого давления. Вакуумная камера устройства для имитационных испытаний обычно должна контролироваться низким давлением через впуск и выпуск. В соответствии с направлением воздушного потока, конец воздухозаборника обычно определяется как верхний по потоку, а выпускной конец вакуумного насоса определяется как нижний по потоку. В зависимости от точности управления обычно используются два режима управления: вверх и вниз по потоку для достижения точного управления низким давлением воздуха в разных диапазонах (10 торр и 1000 торр).
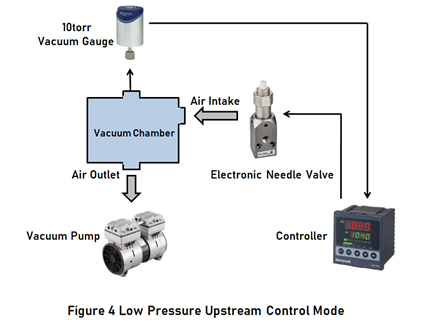
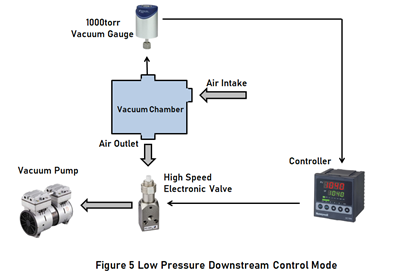
Как показано на рисунке 4, режим восходящего потока предназначен для поддержания давления на входе и выходного потока, а также управления давлением в камере путем регулирования входного потока. Как показано на рисунке 5, режим ниже по потоку предназначен для поддержания давления на входе и входного потока, а также давления в камере управления путем регулирования потока выхлопных газов.
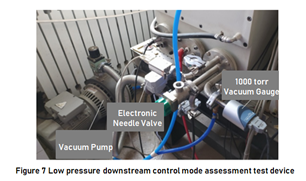
Для двух вышеуказанных режимов управления для проведения оценочного испытания использовались два емкостных манометра на 1 Торр и 1000 Торр и 24-битный высокоточный регулятор давления. Испытательное устройство показано на рисунках 6 и 7.
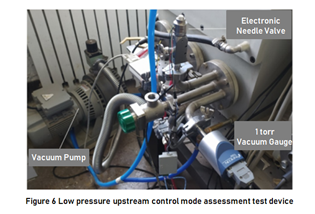
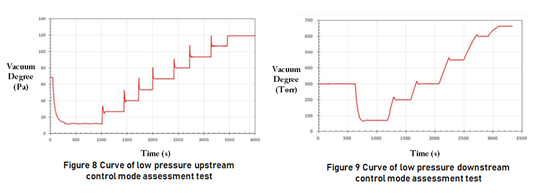
В процессе испытания в режиме восходящего потока вакуумный насос сначала включался, а затем накачивался на полной скорости, а ПИД-параметры регулятора были самонастроены на уровне около 68 Па. После завершения самонастройки контролируются 8 заданных значений 12, 27, 40, 53, 67, 80, 93 и 107 Па соответственно. Изменение давления воздуха в течение всего процесса управления показано на рисунке 8.
Во время теста в режиме ниже по потоку сначала включался вакуумный насос, а затем накачивался на полной скорости, а клапан впуска воздуха устанавливался в положение микрозабора, а затем параметры ПИД-регулятора автоматически настраивались на уровне около 300 Торр. После завершения автонастройки контролируются 5 заданных значений 70, 200, 300, 450 и 600 Торр соответственно. Изменение давления воздуха в течение всего процесса управления показано на рисунке 9.
Путем выражения вышеупомянутых эффектов управления в различных точках постоянного низкого давления как скорости колебаний, получается распределение скорости колебаний во всем диапазоне, показанное на рисунках 10 и 11. Из диаграммы распределения скорости колебаний видно, что скорость колебаний можно точно контролировать в диапазоне ± 1% во всем диапазоне низкого давления, а большие колебания при 12 Па обусловлены параметрами ПИД, полученными путем самонастройки при 68 Па. Это неразумно, и требуется отдельная самонастройка параметра ПИД.
3. Полномасштабная реализация точного управления низким давлением.
Из приведенных выше методов точного управления давлением воздуха видно, что в соответствии с фактическими потребностями можно выбирать различные режимы управления. Например, режим выше по потоку можно выбрать для регулирования низкого давления воздуха ниже 10 торр, а режим ниже по потоку можно выбрать для регулирования высокого давления воздуха в диапазоне от 10 до 1000 торр.
В большинстве испытательных стендов, моделирующих среду низкого давления, особенно при тестировании производительности подруливающих устройств, необходимо обеспечить точный контроль давления воздуха и автоматизацию во всем диапазоне низкого давления, поэтому использование или переключение только режимы управления выше и ниже по потоку.
Чтобы достичь автоматического и точного управления во всем диапазоне низкого давления, мы объединили режимы восходящего и нисходящего потока и предложили техническую схему для режима двустороннего управления. Общая схема схемы представлена на рисунке 12.
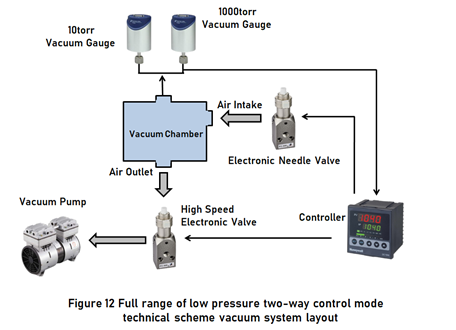
В полномасштабном процессе контроля низкого давления необходимы два емкостных вакуумметра с разными диапазонами измерения, чтобы охватить полный диапазон измерений. Емкостный вакуумметр непрерывного действия и вакуумметр непрерывного действия с ионизацией также можно использовать для охвата более широкого диапазона низкого давления. Для получения дополнительной информации о нашем электронном игольчатом клапане посетите сайтhttps://www.genndih.com/ru/proportional-flow-control-valve.htm
В технической схеме двустороннего режима управления к контроллеру и электронному игольчатому клапану выдвигаются повышенные требования, которые в основном отражаются в следующих аспектах:
(1) Требуется иметь возможность одновременного подключения двух датчиков вакуума и переключения между двумя датчиками вакуума в соответствии со значением измерения низкого давления, чтобы точно измерять и вовремя контролировать низкое давление.
(2) Контроллер должен иметь высокую точность измерений, например 24-битную точность дискретизации АЦП, чтобы соответствовать требованиям к точности измерений различных вакуумметров и полностью использовать возможности измерения вакуумметра.
(3) В режиме двустороннего управления регулятор вакуумного давления также должен иметь функции прямого и обратного управления, то есть обратное управление для электронного игольчатого клапана на входе и обратное управление для электронного шарового клапана на выходе.
(4) В режиме двустороннего управления электронный игольчатый клапан и электронный шаровой клапан отвечают за регулировку потока газа вверх и вниз по потоку и должны работать попеременно, поэтому эти электронные игольчатые клапаны должны иметь максимально возможную скорость срабатывания. Чем меньше вакуумная камера, тем меньше инерция давления воздуха, тем выше требуется скорость срабатывания. Общее требование состоит в том, чтобы время от полного закрытия до полного открытия клапана находилось в пределах 2 секунд или даже меньше.
Подводя итог, можно сказать, что, приняв схему управления низким давлением в вышеуказанном двустороннем режиме, особенно после применения нового высокопроизводительного регулятора вакуумного давления и высокоскоростного электронного игольчатого клапана, можно достичь точного управления полным диапазоном низкого давления.
Аннотация: В данной статье рассматриваются различные электротермические плазменные микродвигатели наноспутников. На примере карманной ракеты, работающей в диапазоне низких давлений от 0,1 до 10 Торр, анализируются характеристики различных рабочих газов и различных малых давлений на шлейфе. Полученные эффекты иллюстрируют важность точного контроля низкого давления. Что касается технической проблемы точного контроля низкого давления воздуха в пропеллере, в этой статье подробно описывается конкретный метод реализации и проводятся оценочные испытания. Результаты испытаний показывают, что степень колебания контроля низкого давления воздуха может достигать ± 1%. В конце концов, в этой статье оптимизируется метод испытаний и предлагается более практичная техническая схема для полномасштабного точного контроля низкого давления.
1. Вопрос
В последние годы, в связи с быстрым развитием NanoSat, возникла острая потребность в небольших по объему, легких, недорогих и высокоэффективных микродвигателях. Поэтому необходимо провести испытания и оценку физических свойств, таких как характеристики плазменного факела двигателя. На характеристики плазменного факела существенное влияние оказывают давление рабочего газа и окружающей среды. На примере испытаний на работоспособность факела зарубежной карманной ракеты анализируется необходимость и важность точного контроля низкого давления.
Типичный представитель приложений NanoSat Pocket Rocket представляет собой электротермический радиочастотный плазменный двигатель, который может развивать тягу порядка от мкН до мН. Благодаря своим компактным размерам и использованию емкостного радиочастотного разряда карманные ракеты могут получать плазменные струи высокой плотности в условиях малой мощности. Он легкий, недорогой, с малой тягой и большим удельным импульсом, а также может работать в виде массивов, которые особенно подходят для микрочипов и обеспечивают питание в течение длительного времени.
Как показано на рисунке 1, горизонтальная вакуумная камера обеспечивает среду низкого давления для проверки характеристик плазменного факела карманной ракеты. Вакуумная камера представляет собой многофункциональную испытательную камеру для моделирования среды низкого давления, в которой можно интегрировать различное испытательное оборудование для проверки производительности и оценки различных плазменных двигателей. Как показано на рисунке 2, для создания среды низкого давления вакуумная камера оснащена молекулярным насосом, механическим насосом, ионизационным вакуумметром и емкостным манометром. Вакуумная камера может достигать эталонного вакуума 0,93 мПа. Рабочими газами в тесте обычно являются азот и аргон.
При мощности и частоте радиочастот 20 Вт и 13,56 МГц соответственно характеристики шлейфа карманной ракеты были протестированы при различных низких давлениях. На рис. 3 представлена экспериментальная фотография плазменного факела, инжектируемого в разные рабочие газы при разных давлениях. Рисунок a представляет собой аргон низкого давления примерно 1,5 торр, рисунок b представляет собой аргон высокого давления примерно 4,0 торр, рисунок c представляет собой азот низкого давления примерно 1,0 торр и рисунок d представляет собой азот высокого давления примерно 7,0 торр.
Из рисунка видно, что факелы как азота, так и аргона при высоком давлении распространяются под определенным углом конуса. Балки коллимируются при низком давлении, но влияние этих особенностей на создание тяги неясно и требует дальнейшего изучения.
Подводя итог, можно сказать, что разные рабочие газы и разное низкое давление будут оказывать существенное влияние на характеристики шлейфа. Микродвигатель карманной ракеты работает в диапазоне низких давлений от 0,1 до 10 Торр. Тестирование и оценка характеристик шлейфа в этом диапазоне требует точного контроля низкого давления. В этой статье будет подробно описан конкретный метод реализации контроля низкого давления, а также протестирован и оценен метод реализации. Наконец, метод реализации будет оптимизирован и предложена техническая схема точного управления полным диапазоном низкого давления.
2. Точный метод контроля и тестовая оценка низкого давления.
Так называемое низкое давление обычно относится к абсолютному давлению ниже 1 стандартного атмосферного давления и диапазону 0,1 ~ 760 Торр. Емкостный манометр обычно используется для точного измерения низкого атмосферного давления. Обычно используются два разных диапазона емкостного манометра 10 Торр и 1000 Торр, чтобы охватить измерение всего диапазона низкого давления. Вакуумная камера устройства для имитационных испытаний обычно должна контролироваться низким давлением через впуск и выпуск. В соответствии с направлением воздушного потока, конец воздухозаборника обычно определяется как верхний по потоку, а выпускной конец вакуумного насоса определяется как нижний по потоку. В зависимости от точности управления обычно используются два режима управления: вверх и вниз по потоку для достижения точного управления низким давлением воздуха в разных диапазонах (10 торр и 1000 торр).
Как показано на рисунке 4, режим восходящего потока предназначен для поддержания давления на входе и выходного потока, а также управления давлением в камере путем регулирования входного потока. Как показано на рисунке 5, режим ниже по потоку предназначен для поддержания давления на входе и входного потока, а также давления в камере управления путем регулирования потока выхлопных газов.
Для двух вышеуказанных режимов управления для проведения оценочного испытания использовались два емкостных манометра на 1 Торр и 1000 Торр и 24-битный высокоточный регулятор давления. Испытательное устройство показано на рисунках 6 и 7.
В процессе испытания в режиме восходящего потока вакуумный насос сначала включался, а затем накачивался на полной скорости, а ПИД-параметры регулятора были самонастроены на уровне около 68 Па. После завершения самонастройки контролируются 8 заданных значений 12, 27, 40, 53, 67, 80, 93 и 107 Па соответственно. Изменение давления воздуха в течение всего процесса управления показано на рисунке 8.
Во время теста в режиме ниже по потоку сначала включался вакуумный насос, а затем накачивался на полной скорости, а клапан впуска воздуха устанавливался в положение микрозабора, а затем параметры ПИД-регулятора автоматически настраивались на уровне около 300 Торр. После завершения автонастройки контролируются 5 заданных значений 70, 200, 300, 450 и 600 Торр соответственно. Изменение давления воздуха в течение всего процесса управления показано на рисунке 9.
Путем выражения вышеупомянутых эффектов управления в различных точках постоянного низкого давления как скорости колебаний, получается распределение скорости колебаний во всем диапазоне, показанное на рисунках 10 и 11. Из диаграммы распределения скорости колебаний видно, что скорость колебаний можно точно контролировать в диапазоне ± 1% во всем диапазоне низкого давления, а большие колебания при 12 Па обусловлены параметрами ПИД, полученными путем самонастройки при 68 Па. Это неразумно, и требуется отдельная самонастройка параметра ПИД.
3. Полномасштабная реализация точного управления низким давлением.
Из приведенных выше методов точного управления давлением воздуха видно, что в соответствии с фактическими потребностями можно выбирать различные режимы управления. Например, режим выше по потоку можно выбрать для регулирования низкого давления воздуха ниже 10 торр, а режим ниже по потоку можно выбрать для регулирования высокого давления воздуха в диапазоне от 10 до 1000 торр.
В большинстве испытательных стендов, моделирующих среду низкого давления, особенно при тестировании производительности подруливающих устройств, необходимо обеспечить точный контроль давления воздуха и автоматизацию во всем диапазоне низкого давления, поэтому использование или переключение только режимы управления выше и ниже по потоку.
Чтобы достичь автоматического и точного управления во всем диапазоне низкого давления, мы объединили режимы восходящего и нисходящего потока и предложили техническую схему для режима двустороннего управления. Общая схема схемы представлена на рисунке 12.
В полномасштабном процессе контроля низкого давления необходимы два емкостных вакуумметра с разными диапазонами измерения, чтобы охватить полный диапазон измерений. Емкостный вакуумметр непрерывного действия и вакуумметр непрерывного действия с ионизацией также можно использовать для охвата более широкого диапазона низкого давления. Для получения дополнительной информации о нашем электронном игольчатом клапане посетите сайтhttps://www.genndih.com/ru/proportional-flow-control-valve.htm
В технической схеме двустороннего режима управления к контроллеру и электронному игольчатому клапану выдвигаются повышенные требования, которые в основном отражаются в следующих аспектах:
(1) Требуется иметь возможность одновременного подключения двух датчиков вакуума и переключения между двумя датчиками вакуума в соответствии со значением измерения низкого давления, чтобы точно измерять и вовремя контролировать низкое давление.
(2) Контроллер должен иметь высокую точность измерений, например 24-битную точность дискретизации АЦП, чтобы соответствовать требованиям к точности измерений различных вакуумметров и полностью использовать возможности измерения вакуумметра.
(3) В режиме двустороннего управления регулятор вакуумного давления также должен иметь функции прямого и обратного управления, то есть обратное управление для электронного игольчатого клапана на входе и обратное управление для электронного шарового клапана на выходе.
(4) В режиме двустороннего управления электронный игольчатый клапан и электронный шаровой клапан отвечают за регулировку потока газа вверх и вниз по потоку и должны работать попеременно, поэтому эти электронные игольчатые клапаны должны иметь максимально возможную скорость срабатывания. Чем меньше вакуумная камера, тем меньше инерция давления воздуха, тем выше требуется скорость срабатывания. Общее требование состоит в том, чтобы время от полного закрытия до полного открытия клапана находилось в пределах 2 секунд или даже меньше.
Подводя итог, можно сказать, что, приняв схему управления низким давлением в вышеуказанном двустороннем режиме, особенно после применения нового высокопроизводительного регулятора вакуумного давления и высокоскоростного электронного игольчатого клапана, можно достичь точного управления полным диапазоном низкого давления.