
2022.03.14
Модернизация системы контроля давления кабины моделирования среды низкого давления для радиозондовой поверки
доля
БОЛЕЕ ДЕТАЛЬНО
Модернизация системы контроля давления кабины моделирования среды низкого давления для радиозондовой поверки
Аннотация: Сосредоточено внимание на проблеме низкой точности управления и стабильности системы контроля давления камеры моделирования среды низкого давления, используемой для радиозондовой проверки, а также неточной конфигурации датчиков давления и систем управления. Пользователи предложили требования к обновлению и преобразованию. В этой статье представлена схема реализации нового поколения системы управления давлением в камере моделирования среды низкого давления, принят двусторонний режим управления и проведены проверочные испытания схемы. Результаты испытаний показывают, что точность и стабильность управления значительно улучшились.
1. Вопрос
Одним из важных методов калибровки радиозонда является испытание кабины, моделирующей среду низкого давления, на земле. Конструкция используемой кабины для моделирования среды низкого давления показана на рисунке 1.
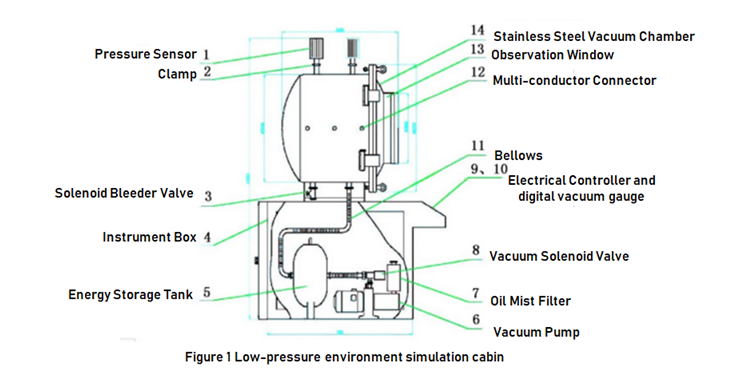
Существует проблема, заключающаяся в том, что контроль давления сильно колеблется во время использования этой камеры для моделирования среды низкого давления. Чем ближе давление к 1 атмосфере, тем больше колебания. Анализ полагает, что это вызвано главным образом следующими причинами:
(1) Выбор датчика давления неверен. Доля погрешности датчика в полномасштабном диапазоне давления не одинакова, что показывает, что колебания велики, когда они близки к 1 атмосфере, и малы, когда они далеки от 1 атмосферы. В реальном мире все проблемы существуют. Большие колебания, но датчик давления имеет самую высокую точность вблизи давления в 1 атмосферу, а погрешность датчика давления полностью перекрывает диапазон колебаний давления на расстоянии от давления в 1 атмосферу. На самом деле колебания в целом большие, но датчик давления имеет самую высокую точность вблизи давления в 1 атмосферу, а погрешность датчика давления полностью перекрывает диапазон колебаний давления на расстоянии от давления в 1 атмосферу.
(2) Управление давлением использует режим управления переключателем. Вакуумный насос и электромагнитный клапан открываются или закрываются одновременно в зависимости от заданного значения давления. Хотя резервуар для хранения газа добавляется в качестве буфера, в этом полуавтоматическом режиме управления трудно добиться точного и постоянного давления.
(3) Контроллер не использует метод автоматического ПИД-регулирования, что также является основной причиной влияния на точность регулирования давления. На основе приведенного выше анализа основное внимание уделяется проблемам низкой точности управления и стабильности системы контроля давления с камерой моделирования среды низкого давления, используемой для калибровки звука предыдущего поколения, а также неточной конфигурации датчика давления и системы управления. Пользователи предложили требования к обновлению и преобразованию. В данной статье будет представлена схема реализации нового поколения с системой управления давлением в камере моделирования среды низкого давления. Предлагается принять режим двунаправленного управления, и будет проведено проверочное испытание схемы, которое доказывает, что точность и стабильность управления могут быть значительно улучшены.
2. Модернизация и реформирование системы контроля давления.с использованием электрического игольчатого клапана серии FCДиапазон абсолютного давления в камере моделирования окружающей среды низкого давления для проверки зонда составляет 1–760 Торр. Требуется, чтобы давление в камере моделирования было точным и постоянным в любой заданной точке в этом диапазоне, и его можно было даже контролировать в соответствии с установить скорость преобразования давления. По этой причине конкретная схема модернизации заключается в том, чтобы сохранить вакуумный насос и вакуумный электромагнитный клапан на основе оригинальной системы контроля давления, заменить датчик давления и контроллер, удалить резервуар для хранения энергии и увеличить впускной и выпускной клапаны воздуха с числовым управлением. Конкретная схема выглядит следующим образом:
(1) Емкостный манометр с сопротивлением 10 Торр и 1000 Торр используется для измерения всего диапазона низкого давления, тем самым обеспечивая точность измерения во всем диапазоне.
(2) Высокоточный ПИД-регулятор вакуумного давления используется для обеспечения точности измерений емкостного манометра и обеспечения точности управления.
(3) Установите электрический игольчатый клапан на впускном и выпускном отверстии вакуумной камеры соответственно. Электрический игольчатый клапан установлен непосредственно на входе воздуха.
(4) Режим управления принимает режим восходящего и нисходящего потока соответственно. Режим восходящего потока используется для регулирования давления воздуха ниже 10 торр, а режим нисходящего потока используется для регулирования давления воздуха в диапазоне 10–760 торр с использованием электрического игольчатого клапана KAOLU (https://www.genndih.com /ru/пропорциональный-расходный-регулирующий клапан.htm)
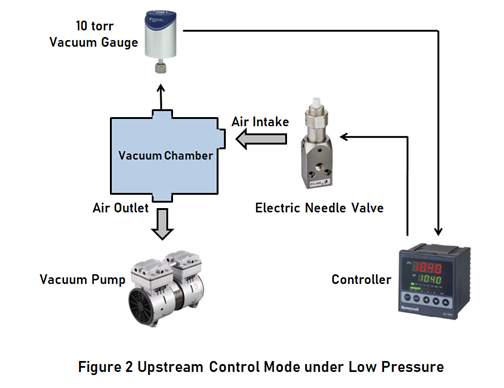
(5) Как показано на рисунке 2, режим восходящего потока предназначен для поддержания постоянного давления на входе и выходного потока, а также управления давлением в камере путем регулирования входного потока.
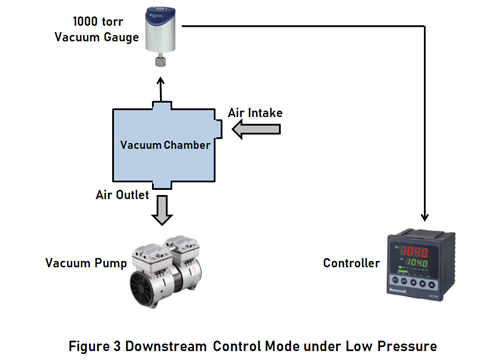
(6) Как показано на рисунке 3, режим ниже по потоку предназначен для поддержания давления на входе и постоянного расхода на входе, а также давления в камере управления путем регулирования потока выхлопных газов.
3. Сертификационные испытания схемы
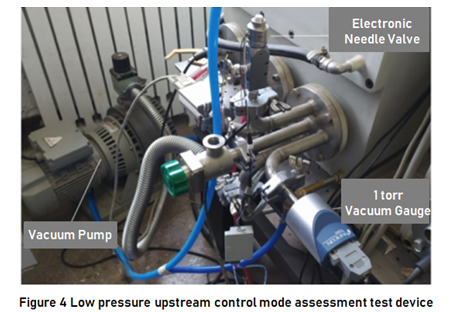
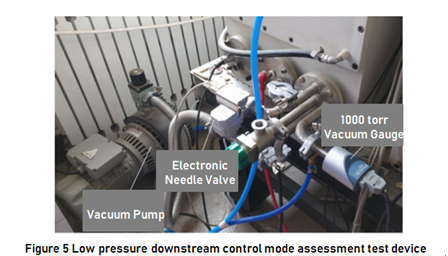
Для двух вышеуказанных режимов управления для проведения оценочного испытания использовались два емкостных манометра на 1 Торр и 1000 Торр, электрический игольчатый клапан и 24-битный высокоточный регулятор давления. Внутреннее пространство вакуумной камеры, использованной для испытаний, составляло 400×400×500 мм; испытательное устройство показано на рисунках 4 и 5.
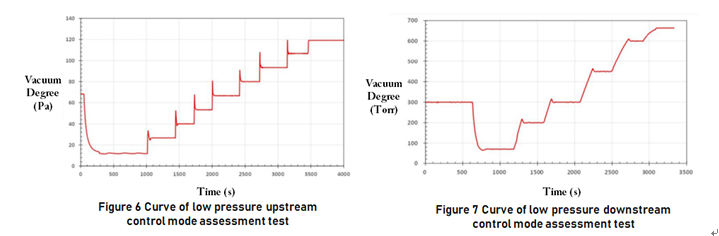
Во время теста восходящего режима сначала включался вакуумный насос, а затем накачивал его на полной скорости. Затем параметры ПИД-регулятора были автоматически настроены на уровне около 68 Па. После завершения автонастройки контролируются 8 заданных значений 12, 27, 40, 53, 67, 80, 93 и 107 Па соответственно. Изменения давления воздуха в течение всего процесса управления показаны на рисунке 6. Во время испытания в нисходящем режиме сначала включался вакуумный насос, а затем накачивался на полной скорости, а электрический игольчатый клапан воздухозаборника устанавливался в положение микрозабора. Затем параметры ПИД-регулятора были автоматически настроены на уровне около 300 Торр. После завершения автонастройки контролируются 5 заданных значений 70, 200, 300, 450 и 600 Торр соответственно. Изменения давления воздуха в течение всего процесса управления показаны на рисунке 7.
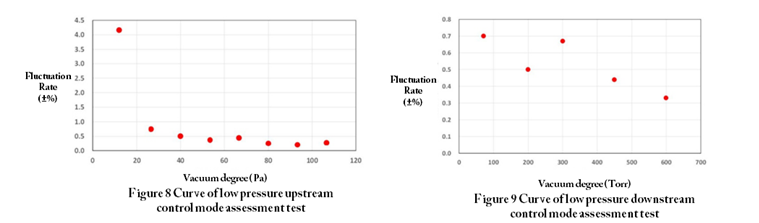
Путем выражения вышеуказанных эффектов управления в различных точках постоянного низкого давления как скорости колебаний, получается распределение скорости колебаний во всем диапазоне, показанном на рисунках 8 и 9. Из диаграммы распределения скорости колебаний видно, что скорость колебаний можно точно контролировать в диапазоне ± 1% во всем диапазоне низкого давления. Большие колебания при 12 Па обусловлены тем, что параметры ПИД, полученные путем самонастройки при 68 Па, недействительны, и требуется отдельная самонастройка параметра ПИД.
Из приведенных выше результатов испытаний видно, что электрический игольчатый клапан может повысить точность и стабильность регулирования давления более чем в пять раз, а также значительно повысить уровень автоматизации и надежность камеры моделирования среды низкого давления. Для получения дополнительной информации о представленном электрическом игольчатом клапане посетите сайтhttps://www.genndih.com/ru/proportional-flow-control-valve/miniature-proportional-valve-0-32L-min.html
Аннотация: Сосредоточено внимание на проблеме низкой точности управления и стабильности системы контроля давления камеры моделирования среды низкого давления, используемой для радиозондовой проверки, а также неточной конфигурации датчиков давления и систем управления. Пользователи предложили требования к обновлению и преобразованию. В этой статье представлена схема реализации нового поколения системы управления давлением в камере моделирования среды низкого давления, принят двусторонний режим управления и проведены проверочные испытания схемы. Результаты испытаний показывают, что точность и стабильность управления значительно улучшились.
1. Вопрос
Одним из важных методов калибровки радиозонда является испытание кабины, моделирующей среду низкого давления, на земле. Конструкция используемой кабины для моделирования среды низкого давления показана на рисунке 1.
Существует проблема, заключающаяся в том, что контроль давления сильно колеблется во время использования этой камеры для моделирования среды низкого давления. Чем ближе давление к 1 атмосфере, тем больше колебания. Анализ полагает, что это вызвано главным образом следующими причинами:
(1) Выбор датчика давления неверен. Доля погрешности датчика в полномасштабном диапазоне давления не одинакова, что показывает, что колебания велики, когда они близки к 1 атмосфере, и малы, когда они далеки от 1 атмосферы. В реальном мире все проблемы существуют. Большие колебания, но датчик давления имеет самую высокую точность вблизи давления в 1 атмосферу, а погрешность датчика давления полностью перекрывает диапазон колебаний давления на расстоянии от давления в 1 атмосферу. На самом деле колебания в целом большие, но датчик давления имеет самую высокую точность вблизи давления в 1 атмосферу, а погрешность датчика давления полностью перекрывает диапазон колебаний давления на расстоянии от давления в 1 атмосферу.
(2) Управление давлением использует режим управления переключателем. Вакуумный насос и электромагнитный клапан открываются или закрываются одновременно в зависимости от заданного значения давления. Хотя резервуар для хранения газа добавляется в качестве буфера, в этом полуавтоматическом режиме управления трудно добиться точного и постоянного давления.
(3) Контроллер не использует метод автоматического ПИД-регулирования, что также является основной причиной влияния на точность регулирования давления. На основе приведенного выше анализа основное внимание уделяется проблемам низкой точности управления и стабильности системы контроля давления с камерой моделирования среды низкого давления, используемой для калибровки звука предыдущего поколения, а также неточной конфигурации датчика давления и системы управления. Пользователи предложили требования к обновлению и преобразованию. В данной статье будет представлена схема реализации нового поколения с системой управления давлением в камере моделирования среды низкого давления. Предлагается принять режим двунаправленного управления, и будет проведено проверочное испытание схемы, которое доказывает, что точность и стабильность управления могут быть значительно улучшены.
2. Модернизация и реформирование системы контроля давления.с использованием электрического игольчатого клапана серии FCДиапазон абсолютного давления в камере моделирования окружающей среды низкого давления для проверки зонда составляет 1–760 Торр. Требуется, чтобы давление в камере моделирования было точным и постоянным в любой заданной точке в этом диапазоне, и его можно было даже контролировать в соответствии с установить скорость преобразования давления. По этой причине конкретная схема модернизации заключается в том, чтобы сохранить вакуумный насос и вакуумный электромагнитный клапан на основе оригинальной системы контроля давления, заменить датчик давления и контроллер, удалить резервуар для хранения энергии и увеличить впускной и выпускной клапаны воздуха с числовым управлением. Конкретная схема выглядит следующим образом:
(1) Емкостный манометр с сопротивлением 10 Торр и 1000 Торр используется для измерения всего диапазона низкого давления, тем самым обеспечивая точность измерения во всем диапазоне.
(2) Высокоточный ПИД-регулятор вакуумного давления используется для обеспечения точности измерений емкостного манометра и обеспечения точности управления.
(3) Установите электрический игольчатый клапан на впускном и выпускном отверстии вакуумной камеры соответственно. Электрический игольчатый клапан установлен непосредственно на входе воздуха.
(4) Режим управления принимает режим восходящего и нисходящего потока соответственно. Режим восходящего потока используется для регулирования давления воздуха ниже 10 торр, а режим нисходящего потока используется для регулирования давления воздуха в диапазоне 10–760 торр с использованием электрического игольчатого клапана KAOLU (https://www.genndih.com /ru/пропорциональный-расходный-регулирующий клапан.htm)
(5) Как показано на рисунке 2, режим восходящего потока предназначен для поддержания постоянного давления на входе и выходного потока, а также управления давлением в камере путем регулирования входного потока.
(6) Как показано на рисунке 3, режим ниже по потоку предназначен для поддержания давления на входе и постоянного расхода на входе, а также давления в камере управления путем регулирования потока выхлопных газов.
3. Сертификационные испытания схемы
Для двух вышеуказанных режимов управления для проведения оценочного испытания использовались два емкостных манометра на 1 Торр и 1000 Торр, электрический игольчатый клапан и 24-битный высокоточный регулятор давления. Внутреннее пространство вакуумной камеры, использованной для испытаний, составляло 400×400×500 мм; испытательное устройство показано на рисунках 4 и 5.
Во время теста восходящего режима сначала включался вакуумный насос, а затем накачивал его на полной скорости. Затем параметры ПИД-регулятора были автоматически настроены на уровне около 68 Па. После завершения автонастройки контролируются 8 заданных значений 12, 27, 40, 53, 67, 80, 93 и 107 Па соответственно. Изменения давления воздуха в течение всего процесса управления показаны на рисунке 6. Во время испытания в нисходящем режиме сначала включался вакуумный насос, а затем накачивался на полной скорости, а электрический игольчатый клапан воздухозаборника устанавливался в положение микрозабора. Затем параметры ПИД-регулятора были автоматически настроены на уровне около 300 Торр. После завершения автонастройки контролируются 5 заданных значений 70, 200, 300, 450 и 600 Торр соответственно. Изменения давления воздуха в течение всего процесса управления показаны на рисунке 7.
Путем выражения вышеуказанных эффектов управления в различных точках постоянного низкого давления как скорости колебаний, получается распределение скорости колебаний во всем диапазоне, показанном на рисунках 8 и 9. Из диаграммы распределения скорости колебаний видно, что скорость колебаний можно точно контролировать в диапазоне ± 1% во всем диапазоне низкого давления. Большие колебания при 12 Па обусловлены тем, что параметры ПИД, полученные путем самонастройки при 68 Па, недействительны, и требуется отдельная самонастройка параметра ПИД.
Из приведенных выше результатов испытаний видно, что электрический игольчатый клапан может повысить точность и стабильность регулирования давления более чем в пять раз, а также значительно повысить уровень автоматизации и надежность камеры моделирования среды низкого давления. Для получения дополнительной информации о представленном электрическом игольчатом клапане посетите сайтhttps://www.genndih.com/ru/proportional-flow-control-valve/miniature-proportional-valve-0-32L-min.html