
2022.03.07
Méthode de contrôle précis de la basse pression dans les caractéristiques du panache Test du micropropulseur à plasma électrothermique NanoSat
PARTAGER
PLUS DE DÉTAILS
Méthode de contrôle précis de la basse pression dans les caractéristiques du panache Test du micropropulseur à plasma électrothermique NanoSat
Résumé : Cet article se concentre sur divers micropropulseurs à plasma électrothermiques nanosat. En prenant comme exemple la fusée de poche, qui fonctionne dans la plage de basse pression de 0,1 à 10 torr, les caractéristiques des différents gaz de travail et des différentes basses pressions sur le panache sont analysées. Les effets qui en résultent illustrent l’importance d’un contrôle précis de la basse pression. Concernant le problème technique du contrôle précis de la basse pression d'air de l'hélice, cet article présente en détail la méthode de mise en œuvre spécifique et effectue un test d'évaluation. Les résultats des tests montrent que le degré de fluctuation du contrôle de la basse pression d'air peut atteindre ± 1 %. En fin de compte, cet article optimise la méthode de test et propose un schéma technique plus pratique pour un contrôle précis des basses pressions à grande échelle.
1. Question
Ces dernières années, avec le développement rapide de NanoSat, il existe un besoin urgent de micro-propulseurs de petit volume, légers, peu coûteux et à haut rendement. Par conséquent, il est nécessaire de procéder à des tests et à une évaluation des propriétés physiques telles que les caractéristiques du panache de plasma du propulseur. Les caractéristiques du panache de plasma sont considérablement affectées par la pression du gaz de travail et de l'environnement. En prenant comme exemple le test de performance du panache d'une fusée de poche étrangère, la nécessité et l'importance d'un contrôle précis de la basse pression sont analysées.
En tant que représentant typique des applications NanoSat, Pocket Rocket est un propulseur à plasma électrothermique radiofréquence qui peut atteindre une poussée de l'ordre du μN au mN. En raison de leur taille compacte et de l’utilisation d’une décharge radiofréquence capacitive, les fusées de poche peuvent obtenir des jets de plasma à haute densité dans des conditions de faible puissance. Il est léger, peu coûteux, à faible poussée et possède une impulsion spécifique importante. Il peut également fonctionner sous la forme de réseaux, particulièrement adaptés aux microréseaux et fournissant de l'énergie à long terme.
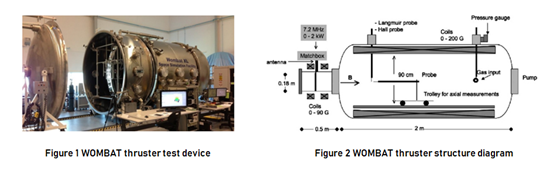
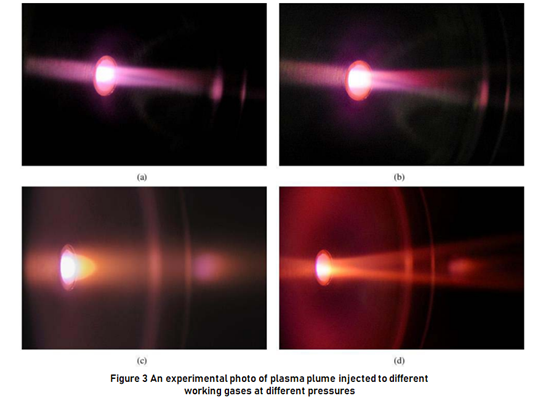
Comme le montre la figure 1, la chambre à vide horizontale fournit un environnement à basse pression pour tester les caractéristiques du panache de plasma d'une fusée de poche. La chambre à vide est une chambre d'essai multifonctionnelle de simulation d'environnement à basse pression, qui peut intégrer une variété d'équipements de test pour le test de performance et l'évaluation de divers propulseurs à plasma. Comme le montre la figure 2, afin de former un environnement basse pression, la chambre à vide est équipée d'une pompe moléculaire, d'une pompe mécanique, d'un manomètre à ionisation et d'un manomètre capacitif. La chambre à vide peut atteindre un vide de référence de 0,93 MPa. Les fluides de travail du gaz utilisés dans le test sont généralement l'azote et l'argon.
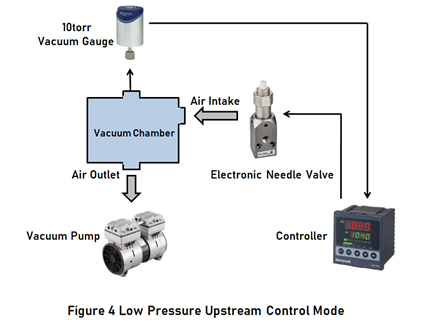
Dans des conditions de puissance RF et de fréquence respectivement de 20 W et 13,56 MHz, les caractéristiques du panache de la fusée de poche ont été testées sous différentes basses pressions. La figure 3 est une photo expérimentale d'un panache de plasma injecté à différents gaz de travail à différentes pressions. La figure a représente environ 1,5 torr d'argon basse pression, la figure b représente environ 4,0 torr d'argon haute pression, la figure c représente environ 1,0 torr d'azote basse pression et la figure d représente environ 7,0 torr d'azote haute pression.
On peut voir sur la figure que les panaches d’azote et d’argon se propagent selon un certain angle de cône à haute pression. Les faisceaux sont collimatés à basse pression, mais l'effet de ces caractéristiques sur la génération de poussée n'est pas clair et nécessite une étude plus approfondie.
En résumé, différents gaz de travail et différentes basses pressions auront un impact significatif sur les caractéristiques du panache. Le micro-propulseur de la fusée de poche fonctionne dans la plage de basse pression de 0,1 à 10 torr. Tester et évaluer les caractéristiques du panache dans cette plage nécessite un contrôle précis de la basse pression. Cet article présentera en détail la méthode de mise en œuvre spécifique pour le contrôle basse pression, testera et évaluera la méthode de mise en œuvre. Enfin, la méthode de mise en œuvre sera optimisée et un schéma technique de contrôle précis de la gamme complète basse pression sera proposé.
2. La méthode de contrôle précise et l'évaluation des tests de basse pression
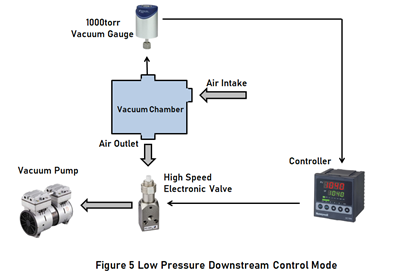
La soi-disant basse pression fait généralement référence à la pression absolue inférieure à 1 pression atmosphérique standard et la plage est de 0,1 à 760 torr. Le manomètre capacitif est couramment utilisé pour mesurer avec précision la basse pression atmosphérique. Il adoptait généralement deux plages différentes de 10 torr et 1 000 torr de manomètre capacitif pour couvrir la mesure de toute la plage basse pression. La chambre à vide du dispositif de test de simulation doit généralement être contrôlée par une basse pression via l'admission et l'échappement. Selon la direction du flux d'air, l'extrémité d'admission d'air est généralement définie comme l'amont et l'extrémité d'échappement de la pompe à vide est définie comme l'aval. Selon la précision du contrôle, deux modes de contrôle en amont et en aval sont généralement utilisés pour obtenir un contrôle précis de la basse pression d'air avec différentes plages (10 torr et 1 000 torr).
Comme le montre la figure 4, le mode en amont consiste à maintenir la pression en amont et le débit de sortie, ainsi qu'à contrôler la pression de la chambre en ajustant le débit d'entrée. Comme le montre la figure 5, le mode aval consiste à maintenir la pression en amont et le débit d'entrée, ainsi que la pression de la chambre de contrôle en ajustant le débit d'échappement.
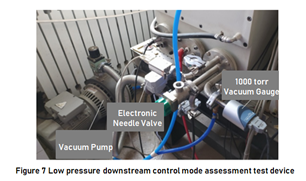
Pour les deux modes de contrôle ci-dessus, deux manomètres capacitifs de 1torr et 1000torr et un contrôleur de pression de haute précision 24 bits ont été utilisés pour effectuer le test d'évaluation. Le dispositif de test est illustré à la Figure 6 et à la Figure 7.
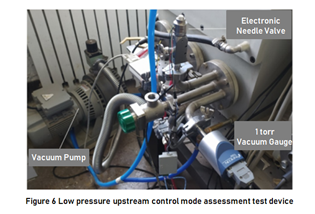
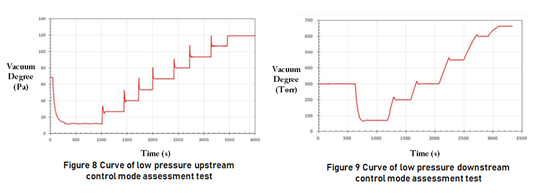
Au cours du processus de test du mode amont, la pompe à vide a d'abord été allumée puis pompée à pleine vitesse, et les paramètres PID du contrôleur ont été auto-réglés à environ 68 Pa. Une fois l'autoréglage terminé, 8 points de consigne de 12, 27, 40, 53, 67, 80, 93 et 107 Pa sont contrôlés respectivement. Le changement de pression atmosphérique pendant tout le processus de contrôle est illustré à la figure 8.
Au cours du processus de test du mode aval, la pompe à vide a d'abord été allumée puis pompée à pleine vitesse, et la vanne d'admission d'air a été ajustée à la position de micro-admission, puis les paramètres PID du contrôleur ont été auto-réglés à environ 300 torr. Une fois le réglage automatique terminé, 5 points de consigne de 70, 200, 300, 450 et 600 Torr sont contrôlés respectivement. Le changement de pression atmosphérique pendant tout le processus de contrôle est illustré à la figure 9.
En exprimant les effets de contrôle ci-dessus à différents points constants de basse pression sous forme de taux de fluctuation, la distribution du taux de fluctuation dans toute la plage représentée sur la figure 10 et la figure 11 est obtenue. Le diagramme de distribution du taux de fluctuation montre que le taux de fluctuation peut être contrôlé avec précision dans la plage de ± 1 % dans toute la plage de basse pression, et que la grande fluctuation à 12 Pa est due aux paramètres PID obtenus par auto-réglage à 68 Pa. C'est déraisonnable et un auto-réglage séparé des paramètres PID est nécessaire.
3. Mise en œuvre d'un contrôle précis à basse pression à grande échelle
Il ressort des méthodes de contrôle précises de la pression atmosphérique ci-dessus que différents modes de contrôle peuvent être sélectionnés en fonction des besoins réels. Par exemple, le mode amont peut être sélectionné pour un contrôle de basse pression d'air inférieur à 10 torr, et le mode aval peut être sélectionné pour un contrôle de haute pression d'air dans la plage de 10 à 1 000 torr.
Dans la plupart des équipements de test de simulation d'environnement basse pression, en particulier pour les tests de performances des propulseurs, il est nécessaire d'atteindre un contrôle précis de la pression de l'air et une automatisation dans toute la plage basse pression, ce n'est donc pas le meilleur choix d'utiliser ou de commuter le modes de contrôle amont et aval seuls.
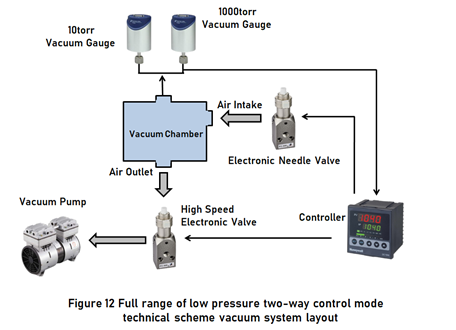
Afin d'atteindre un contrôle automatique et précis dans toute la plage des basses pressions, nous avons intégré les modes amont et aval et proposé un schéma technique pour le mode de contrôle bidirectionnel. La disposition globale du schéma est illustrée à la figure 12.
Dans le processus de contrôle à grande échelle de la basse pression, deux jauges à vide capacitives avec différentes plages de mesure sont nécessaires pour couvrir la plage à pleine échelle. Un vacuomètre capacitif continu et un vacuomètre à ionisation continue peuvent également être utilisés pour couvrir une plage de basse pression plus large. Pour plus d’informations sur notre vanne à pointeau électronique, veuillez visiterhttps://www.genndih.com/fr/valve-de-contrôle-de-débit-proportionnel.htm
Dans le schéma technique du mode de contrôle bidirectionnel, des exigences plus élevées sont avancées pour le contrôleur et la vanne à pointeau électronique, qui se reflètent principalement dans les aspects suivants :
(1) Il est nécessaire de pouvoir connecter deux capteurs de vide en même temps et de basculer entre deux capteurs de vide en fonction de la valeur de mesure de basse pression, afin de mesurer et de contrôler avec précision la basse pression dans le temps.
(2) Le contrôleur doit avoir une précision de mesure élevée, telle qu'une précision d'échantillonnage A/D de 24 bits, pour répondre aux exigences de précision de mesure des différentes jauges à vide et exploiter pleinement la capacité de mesure de la jauge à vide.
(3) En mode de contrôle bidirectionnel, le contrôleur de pression à vide doit également avoir des fonctions de contrôle avant et arrière, c'est-à-dire un contrôle inverse pour la vanne à pointeau électronique en amont et un contrôle inverse pour le robinet à tournant sphérique électronique en aval.
(4) En mode de contrôle bidirectionnel, la vanne à pointeau électronique et la vanne à bille électronique sont responsables du réglage du débit de gaz en amont et en aval qui doivent fonctionner en alternance, ces vannes à pointeau électroniques doivent donc avoir la vitesse de réponse la plus rapide possible. Plus la chambre à vide est petite, plus l'inertie de la pression d'air est petite, plus la vitesse de réponse est rapide. L'exigence générale est que le temps entre la fermeture complète et l'ouverture complète de la vanne soit inférieur à 2 secondes ou même moins.
Pour résumer, en adoptant le schéma de contrôle basse pression du mode bidirectionnel ci-dessus, en particulier après l'adoption du nouveau contrôleur de pression à vide haute performance et de la vanne à pointeau électronique à grande vitesse, le contrôle précis de la plage complète basse pression peut être atteint.
Résumé : Cet article se concentre sur divers micropropulseurs à plasma électrothermiques nanosat. En prenant comme exemple la fusée de poche, qui fonctionne dans la plage de basse pression de 0,1 à 10 torr, les caractéristiques des différents gaz de travail et des différentes basses pressions sur le panache sont analysées. Les effets qui en résultent illustrent l’importance d’un contrôle précis de la basse pression. Concernant le problème technique du contrôle précis de la basse pression d'air de l'hélice, cet article présente en détail la méthode de mise en œuvre spécifique et effectue un test d'évaluation. Les résultats des tests montrent que le degré de fluctuation du contrôle de la basse pression d'air peut atteindre ± 1 %. En fin de compte, cet article optimise la méthode de test et propose un schéma technique plus pratique pour un contrôle précis des basses pressions à grande échelle.
1. Question
Ces dernières années, avec le développement rapide de NanoSat, il existe un besoin urgent de micro-propulseurs de petit volume, légers, peu coûteux et à haut rendement. Par conséquent, il est nécessaire de procéder à des tests et à une évaluation des propriétés physiques telles que les caractéristiques du panache de plasma du propulseur. Les caractéristiques du panache de plasma sont considérablement affectées par la pression du gaz de travail et de l'environnement. En prenant comme exemple le test de performance du panache d'une fusée de poche étrangère, la nécessité et l'importance d'un contrôle précis de la basse pression sont analysées.
En tant que représentant typique des applications NanoSat, Pocket Rocket est un propulseur à plasma électrothermique radiofréquence qui peut atteindre une poussée de l'ordre du μN au mN. En raison de leur taille compacte et de l’utilisation d’une décharge radiofréquence capacitive, les fusées de poche peuvent obtenir des jets de plasma à haute densité dans des conditions de faible puissance. Il est léger, peu coûteux, à faible poussée et possède une impulsion spécifique importante. Il peut également fonctionner sous la forme de réseaux, particulièrement adaptés aux microréseaux et fournissant de l'énergie à long terme.
Comme le montre la figure 1, la chambre à vide horizontale fournit un environnement à basse pression pour tester les caractéristiques du panache de plasma d'une fusée de poche. La chambre à vide est une chambre d'essai multifonctionnelle de simulation d'environnement à basse pression, qui peut intégrer une variété d'équipements de test pour le test de performance et l'évaluation de divers propulseurs à plasma. Comme le montre la figure 2, afin de former un environnement basse pression, la chambre à vide est équipée d'une pompe moléculaire, d'une pompe mécanique, d'un manomètre à ionisation et d'un manomètre capacitif. La chambre à vide peut atteindre un vide de référence de 0,93 MPa. Les fluides de travail du gaz utilisés dans le test sont généralement l'azote et l'argon.
Dans des conditions de puissance RF et de fréquence respectivement de 20 W et 13,56 MHz, les caractéristiques du panache de la fusée de poche ont été testées sous différentes basses pressions. La figure 3 est une photo expérimentale d'un panache de plasma injecté à différents gaz de travail à différentes pressions. La figure a représente environ 1,5 torr d'argon basse pression, la figure b représente environ 4,0 torr d'argon haute pression, la figure c représente environ 1,0 torr d'azote basse pression et la figure d représente environ 7,0 torr d'azote haute pression.
On peut voir sur la figure que les panaches d’azote et d’argon se propagent selon un certain angle de cône à haute pression. Les faisceaux sont collimatés à basse pression, mais l'effet de ces caractéristiques sur la génération de poussée n'est pas clair et nécessite une étude plus approfondie.
En résumé, différents gaz de travail et différentes basses pressions auront un impact significatif sur les caractéristiques du panache. Le micro-propulseur de la fusée de poche fonctionne dans la plage de basse pression de 0,1 à 10 torr. Tester et évaluer les caractéristiques du panache dans cette plage nécessite un contrôle précis de la basse pression. Cet article présentera en détail la méthode de mise en œuvre spécifique pour le contrôle basse pression, testera et évaluera la méthode de mise en œuvre. Enfin, la méthode de mise en œuvre sera optimisée et un schéma technique de contrôle précis de la gamme complète basse pression sera proposé.
2. La méthode de contrôle précise et l'évaluation des tests de basse pression
La soi-disant basse pression fait généralement référence à la pression absolue inférieure à 1 pression atmosphérique standard et la plage est de 0,1 à 760 torr. Le manomètre capacitif est couramment utilisé pour mesurer avec précision la basse pression atmosphérique. Il adoptait généralement deux plages différentes de 10 torr et 1 000 torr de manomètre capacitif pour couvrir la mesure de toute la plage basse pression. La chambre à vide du dispositif de test de simulation doit généralement être contrôlée par une basse pression via l'admission et l'échappement. Selon la direction du flux d'air, l'extrémité d'admission d'air est généralement définie comme l'amont et l'extrémité d'échappement de la pompe à vide est définie comme l'aval. Selon la précision du contrôle, deux modes de contrôle en amont et en aval sont généralement utilisés pour obtenir un contrôle précis de la basse pression d'air avec différentes plages (10 torr et 1 000 torr).
Comme le montre la figure 4, le mode en amont consiste à maintenir la pression en amont et le débit de sortie, ainsi qu'à contrôler la pression de la chambre en ajustant le débit d'entrée. Comme le montre la figure 5, le mode aval consiste à maintenir la pression en amont et le débit d'entrée, ainsi que la pression de la chambre de contrôle en ajustant le débit d'échappement.
Pour les deux modes de contrôle ci-dessus, deux manomètres capacitifs de 1torr et 1000torr et un contrôleur de pression de haute précision 24 bits ont été utilisés pour effectuer le test d'évaluation. Le dispositif de test est illustré à la Figure 6 et à la Figure 7.
Au cours du processus de test du mode amont, la pompe à vide a d'abord été allumée puis pompée à pleine vitesse, et les paramètres PID du contrôleur ont été auto-réglés à environ 68 Pa. Une fois l'autoréglage terminé, 8 points de consigne de 12, 27, 40, 53, 67, 80, 93 et 107 Pa sont contrôlés respectivement. Le changement de pression atmosphérique pendant tout le processus de contrôle est illustré à la figure 8.
Au cours du processus de test du mode aval, la pompe à vide a d'abord été allumée puis pompée à pleine vitesse, et la vanne d'admission d'air a été ajustée à la position de micro-admission, puis les paramètres PID du contrôleur ont été auto-réglés à environ 300 torr. Une fois le réglage automatique terminé, 5 points de consigne de 70, 200, 300, 450 et 600 Torr sont contrôlés respectivement. Le changement de pression atmosphérique pendant tout le processus de contrôle est illustré à la figure 9.
En exprimant les effets de contrôle ci-dessus à différents points constants de basse pression sous forme de taux de fluctuation, la distribution du taux de fluctuation dans toute la plage représentée sur la figure 10 et la figure 11 est obtenue. Le diagramme de distribution du taux de fluctuation montre que le taux de fluctuation peut être contrôlé avec précision dans la plage de ± 1 % dans toute la plage de basse pression, et que la grande fluctuation à 12 Pa est due aux paramètres PID obtenus par auto-réglage à 68 Pa. C'est déraisonnable et un auto-réglage séparé des paramètres PID est nécessaire.
3. Mise en œuvre d'un contrôle précis à basse pression à grande échelle
Il ressort des méthodes de contrôle précises de la pression atmosphérique ci-dessus que différents modes de contrôle peuvent être sélectionnés en fonction des besoins réels. Par exemple, le mode amont peut être sélectionné pour un contrôle de basse pression d'air inférieur à 10 torr, et le mode aval peut être sélectionné pour un contrôle de haute pression d'air dans la plage de 10 à 1 000 torr.
Dans la plupart des équipements de test de simulation d'environnement basse pression, en particulier pour les tests de performances des propulseurs, il est nécessaire d'atteindre un contrôle précis de la pression de l'air et une automatisation dans toute la plage basse pression, ce n'est donc pas le meilleur choix d'utiliser ou de commuter le modes de contrôle amont et aval seuls.
Afin d'atteindre un contrôle automatique et précis dans toute la plage des basses pressions, nous avons intégré les modes amont et aval et proposé un schéma technique pour le mode de contrôle bidirectionnel. La disposition globale du schéma est illustrée à la figure 12.
Dans le processus de contrôle à grande échelle de la basse pression, deux jauges à vide capacitives avec différentes plages de mesure sont nécessaires pour couvrir la plage à pleine échelle. Un vacuomètre capacitif continu et un vacuomètre à ionisation continue peuvent également être utilisés pour couvrir une plage de basse pression plus large. Pour plus d’informations sur notre vanne à pointeau électronique, veuillez visiterhttps://www.genndih.com/fr/valve-de-contrôle-de-débit-proportionnel.htm
Dans le schéma technique du mode de contrôle bidirectionnel, des exigences plus élevées sont avancées pour le contrôleur et la vanne à pointeau électronique, qui se reflètent principalement dans les aspects suivants :
(1) Il est nécessaire de pouvoir connecter deux capteurs de vide en même temps et de basculer entre deux capteurs de vide en fonction de la valeur de mesure de basse pression, afin de mesurer et de contrôler avec précision la basse pression dans le temps.
(2) Le contrôleur doit avoir une précision de mesure élevée, telle qu'une précision d'échantillonnage A/D de 24 bits, pour répondre aux exigences de précision de mesure des différentes jauges à vide et exploiter pleinement la capacité de mesure de la jauge à vide.
(3) En mode de contrôle bidirectionnel, le contrôleur de pression à vide doit également avoir des fonctions de contrôle avant et arrière, c'est-à-dire un contrôle inverse pour la vanne à pointeau électronique en amont et un contrôle inverse pour le robinet à tournant sphérique électronique en aval.
(4) En mode de contrôle bidirectionnel, la vanne à pointeau électronique et la vanne à bille électronique sont responsables du réglage du débit de gaz en amont et en aval qui doivent fonctionner en alternance, ces vannes à pointeau électroniques doivent donc avoir la vitesse de réponse la plus rapide possible. Plus la chambre à vide est petite, plus l'inertie de la pression d'air est petite, plus la vitesse de réponse est rapide. L'exigence générale est que le temps entre la fermeture complète et l'ouverture complète de la vanne soit inférieur à 2 secondes ou même moins.
Pour résumer, en adoptant le schéma de contrôle basse pression du mode bidirectionnel ci-dessus, en particulier après l'adoption du nouveau contrôleur de pression à vide haute performance et de la vanne à pointeau électronique à grande vitesse, le contrôle précis de la plage complète basse pression peut être atteint.